During World War II, one of the greatest dangers faced by the Allies was the attacks of German submarines against Allied ships along the Atlantic supply lines, which was one of the greatest dangers faced by the Allied forces.
To counter this threat, the British Royal Navy and the United States Navy utilized two types of underwater detection equipment, which provided a new way to detect and attack submarines submerged underwater, despite their limited effectiveness.
Those two types were “ASDIC” and “Sonar”. Research and development continued on the two technologies in Britain and the United States and as soon as World War II broke out, the Royal Navy had 220 warships including destroyers and patrol ships equipped with “ASDIC” devices, while the United States Navy entered the war in December 1941, with 170 destroyers equipped with “Sonar” devices. These foundations led to great progress, especially in the field of electronics, paving the way for the development of more accurate equipment.
The purpose of this research is to explain the principles of sonar operation, look at its role, and the types of available devices.
Sound dispersion
Sound waves are pressure waves that move through a medium, that may be solid, liquid, or gas. Sound waves do not propagate in a vacuum, and the source of the sound waves is a transducer, equipped with an oscillating barrier (similar to the ones found in speakers).
Sonar devices usually use frequencies in the range of sound frequencies between 4 and 14 kHz. In water, the speed of sound is 4 times its speed in the air, and it ranges from 1460 meters per second at a temperature of 4 degrees Celsius to 1620 meters at a temperature of 30 degrees Celsius.
When a sound wave hits an object within the medium in which it is traveling, or the boundary between two mediums (such as water and air), this causes a reflection in the wave, and it bounces off the object it hits at an angle equal to the angle of incidence while at sea, up to a depth of 200 meters, the waves are reflected after hitting the bottom.
While using sonar, we encounter 3 types of echoes: body-reflected sounds, surface-reflected sounds (which have the highest intensity immediately after being transmitted), and bottom-reflected sounds (which are most intense in shallow water, especially in the presence of a rocky bottom.)
Another important factor in using sonar is the loss of energy to sound waves as they pass through the medium (in the case of seawater). The acuity of this energy loss depends on the range of the device, and depends on the state of the sea, and is usually high if the water has air bubbles (as in the case of a ship sailing, or the presence of strong surface winds that form surface foam from air and seawater).
Energy absorption or dispersion occurs if there are floating or suspended particles, such as seaweed, or parasites that live in water.
Among all the related factors rarefaction is the most important element in the transmission of sound, as it can reduce the range in which any submarine can be detected to almost zero, or make it change unexpectedly, depending on the conditions of the sea.
Submarines usually try to make the most of the effects of disruption during offensive actions.
Depth noise
Sonar devices are usually equipped with listening devices, and sometimes the operator of these devices has to rely on his ears to distinguish between different sounds. His main task is to capture and verify real signals and distinguish them from depth noise.
Hearing aids are more useful on submarines than on surface ships, as surface ships moving at high speed generate a large amount of noise that overshadows sounds from outside sources.
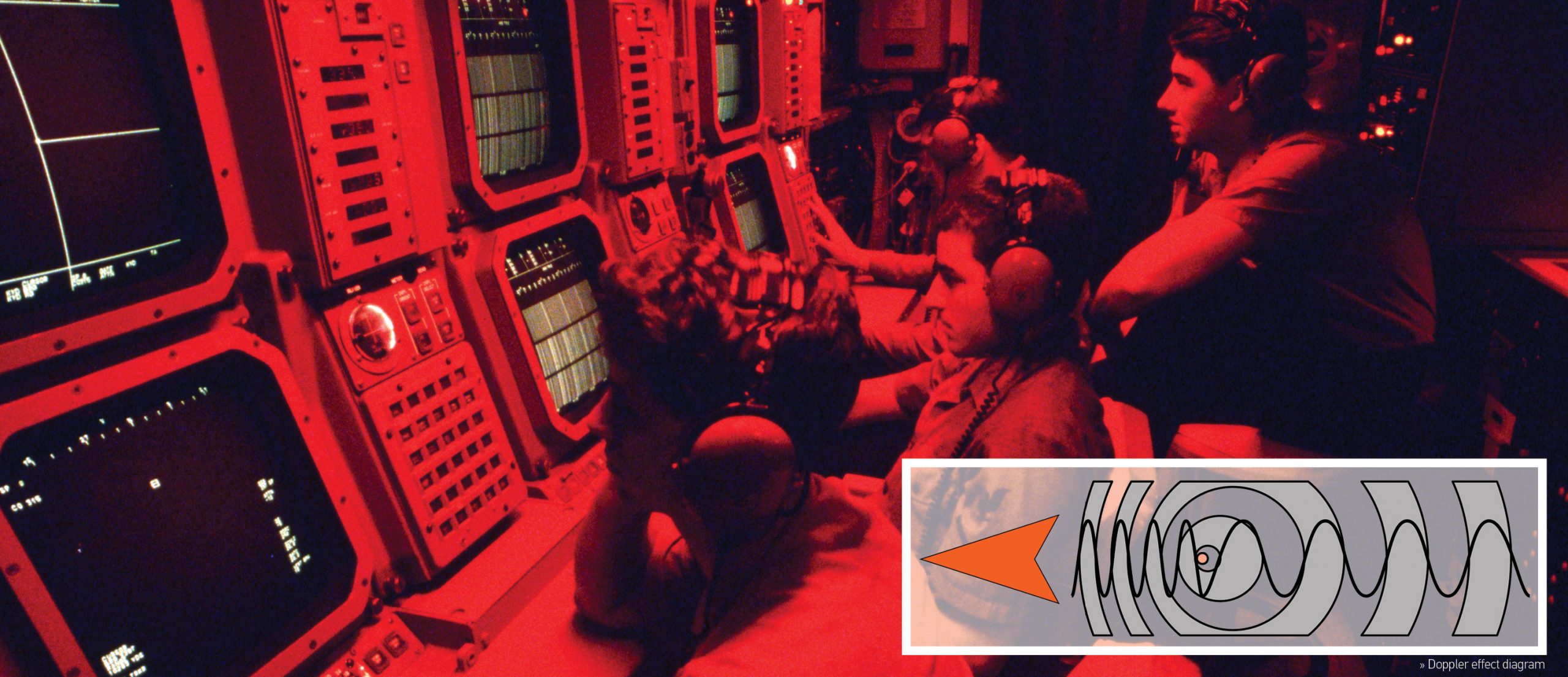
The Doppler phenomenon
Austrian physicist Christian Doppler discovered the Doppler principle, which can be applied to all wave motion, that principle states that if there is a relative movement between the source of the wave and its receiver, the apparent frequency in the receiver differs from the frequency in the source, and this principle has important practical applications in the use of sonar technology.
The audible sound frequency is affected by the relative movement between the target and the receiver, i.e. if the target is moving towards the transducer, the echo frequency becomes greater than the frequency known as the Up-Doppler, while the resonance frequency becomes lower than the frequency, If the target moves away from the transducer, which is known as Down-Doppler.
It is also critical to understand that the Doppler phenomenon is also caused by the movement of the ship, and if the target is stationary, and the tracked ship is moving, the same rule applies.
Power Transformer Principles
It is the transducer that transmits the impulses to the outside. It receives the reverberations, making it the heart of modern “sonar” systems.
The transducer acts as a receiver for the returning lights, similar to a how normal microphone works, and as soon as the echo hits the barrier, the lengths of the nickel tubes change, this leads to the occurrence of a current in the coils surrounding the tubes, as a result of the reflection of the transmissions, this electrical current produced is used in the receiver, after it is amplified and passed on to a display device, or converted into audio frequencies in a loudspeaker.

Practical use of sonar
for many purposes, not all of which are related to anti-submarine warfare, Naval forces are interested in locating underwater objects, most important of which is anti-submarine operations. Whatever the goal, the success in locating underwater objects is a result of accurate, organized, and continuous procedures, this depends on the fact that the sonar can perform the following operations:
1- Finding contact with the target using sound energy.
2- Maintaining contact until the goal is achieved.
3- Taking an appropriate position from the target, with regard to distance and deviation.
4- Determining the speed in relation to the difference in the distance and deviation from the target.
To explain how these factors come into play, we will limit our discussion to the uses of “sonar” techniques in searches carried out by surface ships designated to work against submarines and the tasks that can be assigned to a surface ship working against a submarine
These tasks include the following:
The hunt: detecting the presence of the largest possible number of enemy submarines, without any additional information about their exact number or location.
Identification: detecting an enemy submarine and locating it with a reasonable degree of accuracy.
Cover: finding an area close to friendly naval forces, that any enemy submarine must pass through if it wants to attack, and then locating any enemy submarine that passes through this well-traveled area.
The barrier: the establishment of a fixed barrier to prevent the passage of enemy submarines.
Types of sonar
Sonar devices can be divided into two main types:
Directional sonar: Directional sonars are still used in port defense, as the area that needs to be covered is limited, however, this type of device has disappeared from modern ships.
This type of Sonar devices uses directional transducers to focus the sound pulse that is emitted into a narrow beam, and the angle of the target is determined by pointing the transducer to receive the maximum force of the echo. The echo-response is audible, beginning a slow, step-by-step thorough underwater inspection process.
Scanning Sonar: This type of sonar solved many of the issues that were caused by the long time required to search a large area, as the scanning sonar allows the operator to inspect the area around his ship in a very short time, a feature that was unavailable in the past.
Thus, it is now possible to inspect a circular area with a diameter of 1000 yards in 1.5 seconds, while the directional sonar requires 60 times as long to inspect the same area. Scanning sonar also allows the operator to track all underwater objects within the range of his device, providing a complete and continuous picture of all objects and sound sources in the area, and he can track several different targets simultaneously.
Types of sonar scanning devices
There are two main types of scanning sonars, the first emits short sound pulses, while the second transmits a continuous signal of a different frequency.
Airborne sonar devices
Searching for submarines using aircrafts is an important factor in anti-submarine warfare.
All types of anti-submarine aircraft, whether fixed-wing or helicopters, can carry out missions to search for and attack submarines, taking advantage of many qualities that are not available in ships, such as speed, maneuverability (especially for helicopters), and speed of intervention, in addition, the plane does not emit any sound that could interfere with the processes of “sonar”, since it does not come into contact with water.
Detection devices used on aircraft are very different from those used on ships, some of which (such as MAD devices) play a crucial role in achieving what is known as “discrete coverage”, which is useful in giving a general idea of the different types of devices, namely: diving “sonars”, sound buoys, magnetic anomaly phenomenon detectors (MAD), and advanced sonar.
Diving sonar
Hydrophones or transducers are attached to the end of a wire that connects to a helicopter’s “sonar”, then the hydrophone is lowered into the sea, and the onboard operator begins to listen.
This type of equipment can only be used in helicopters, because Helicopters, while very noisy in the air, make very little sound underwater, so they are safe from the countermeasures deployed by submarines.
Once an enemy submarine is detected, the helicopter can either call for a hunter destroyer, or an anti-submarine ship, to attack the target or attack it by itself if it is carrying guided torpedoes such as the American “Mark 43” torpedo.
Magnetic phenomenon detector
The Magnetic Phenomenon Anomaly Detector (MAD) is another very important device in detecting submarines, and it can be fitted to fixed-wing aircrafts or helicopters. The MAD device enables the crew of a low-flying patrol aircraft to detect the presence of submarines.
Sound buoys
Sound buoys are used to detect underwater sounds, transmitted by radio to nearby aircraft, or other stations equipped with the appropriate receiving equipment.
Sound buoys are single-use devices that are ejected from any type of aircraft, using a small parachute carried by the device.
To track the enemy submarine, several buoys must be deployed, according to a pre-prepared pattern or design. Each water speaker is connected to a long wire that is loosened to the fullest, leaving the water speaker underwater and attached to the buoy that remains on the surface, then a comparison between the signals picked up by several water buoys enables the aircraft to determine the location of the target.
Port Defense
One of the main goals of anti-submarine warfare is to prevent submarines from approaching or entering ports, thus defense forces establish complete detection lines, using various types of devices.
These types include a multi-indicator instrument and a magnetic frame indicator that is placed on the seafloor to record any distortion in the Earth’s magnetic field, which may be caused by the presence of a metal object moving over it.
Other acoustic devices record the sounds of the propellers and motors, alerting operators to the approach of any ship. In addition, the submerged part of the hulls of ships – not just submarines – forms a surface that reflects sound waves, and so “sonar” devices can be used against them as well.
In addition to all of the previously mentioned devices, there is a device known as the “Herald”, used to defend ports.
Tactically speaking, the Herald is the most accurate underwater sound detector, as it allows the operator to determine the exact direction and range of the potential target, so that the patrol ships guarding can head to the exact location of the target.
Crucial conclusion
Today, Anti-submarine warfare is of particular importance, as the Russian submarine fleet has become the greatest threat to the western lines of communication in the Atlantic in recent years, other reasons stem from the development of the submarine fleets carrying American and Russian ballistic missiles.
submarines carrying nuclear missiles are considered one of the two countries’ biggest nuclear deterrents, given the high mobility of this type of weapon, and the difficulty of locating the submarine carrying it, it can survive most surprise attacks that would paralyze the movement of the air force and naval missile silos.
It has become quite clear that the ability to determine the locations of nuclear submarines will put either country in a position of power to turn the “balance of terror” and carry out a surprise attack, without fear of any retaliation, and thus special attention is given to research and development of anti-submarine warfare, and Submarine detection equipment.
There is no doubt that in the future we will witness major developments in this field, which will have an effective impact on anti-submarine warfare and maritime strategy in general.
« By: Dr. Moeen Ahmed Mahmoud (military researcher and strategist)